机器视觉技术之边缘检测
数字图像的边缘检测是图像分割、目标区域的识别、区域形状提取等图像分析领域十分重要的基础,图像理解和分析的第一步往往就是边缘检测,目前它已成为机器视觉研究领域Zui活跃的课题之一,在工程应用中占有十分重要的地位。
图像的特征指图像场中可用作标志的属性,而图像的边缘是图像Zui基本的特征。在数字图像中,所谓边缘是指其周围像素灰度有阶跃变化或屋顶变化的那些像素的集合。由于物体的边缘是由灰度不连续性所反映的,因此一般边缘检测方法是考察图像的每个像素在某个领域内灰度的变化,利用边缘邻近一阶或二阶方向导数变化规律来检测边缘,这种方法通常称为边缘检测局部算子法。景通是国内大型视觉图像公司,针对图像边缘的检测,运用Canny算法进行图像的处理分割检测,具体算法步骤如下:
滤波:边缘检测算法主要是基于图像强度的一阶和二阶导数,但导数的计算对噪声很敏感,因此必须使用滤波器来改善与噪声有关的边缘检测器的性能.需要指出,大多数滤波器在降低噪声的同时也导致了边缘强度的损失,因此,增强边缘和降低噪声之间需要折衷.
增强:增强边缘的基础是确定图像各点邻域强度的变化值.增强算法可以将邻域(或局部)强度值有显著变化的点突显出来.边缘增强一般是通过计算梯度幅值来完成的.
检测:在图像中有许多点的梯度幅值比较大,而这些点在特定的应用领域中并不都是边缘,所以应该用某种方法来确定哪些点是边缘点.Zui简单的边缘检测判据是梯度幅值阈值判据.
定位:如果某一应用场合要求确定边缘位置,则边缘的位置可在子像素分辨率上来估计,边缘的方位也可以被估计出来.
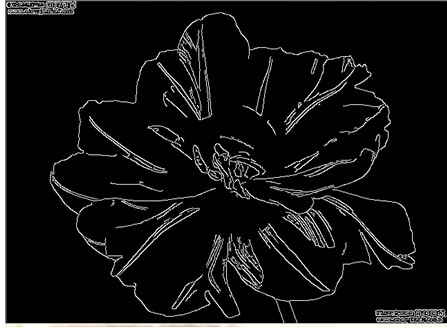
分割处理得到清晰的边缘图像,如下图所示:
边缘检测的三种方法:
直接利用阈值。这种方法简便,快速。但是精确度不高。用在光源比较稳定的环境中。
利用灰度值投影曲线的一阶导数,返回值为指定的阈值处的一阶导数,此阈值比实际的阈值要小。此方法优点:周围环境的影响小,可以在环境光照变化大时用此方法。速度和精确度在这三种方法中居中。
灰度值投影曲线的二阶导数,判断零点。精确度高,但速度低、噪声大的图像不易用此法。